Thanks to the widespread prevalence of GPS in phones, vehicles, and other devices, real-time location system (RTLS) technologies are a familiar concept to many. It is often understood that the RTLS technology we refer to as GPS (Global Positioning System) uses a constellation of satellites to determine the position of a receiving device like a smartphone or vehicle navigation system.
Despite our reliance on GPS for many daily activities, end users don’t always have a thorough understanding of how the system functions beyond the use of satellites. In this article, we will take a closer look at what goes on behind the scenes when your phone tells you to take the next left or your camera conveniently geotags a photo with the exact location it was taken. A better understanding of the science behind the real-time location system technology we are intuitively familiar with will allow us to explore the challenges of taking real-time positioning indoors and how ZeroKey’s hyper-accurate Quantum RTLS technology overcomes those challenges.
In 2021, the total count of installed GNSS devices surpassed 6.5 billion units worldwide with the industry valuation expected to exceed 500Bn USD by 2031.
GPS positioning begins with a network of satellites in medium earth orbit, travelling around the world every 12 hours at an altitude of over 20,000km. It is interesting to note that what we commonly call GPS refers specifically to the constellation of satellites operated and maintained by the United States. However, other satellite constellations are also publicly accessible, such as the Russian–operated GLONASS, the European Union’s Galileo, and the Chinese BeiDou system. We refer collectively to the multi-constellation satellite network as GNSS (Global Navigation Satellite System). Most ‘GPS’ receivers we are familiar with are more accurately called GNSS receivers as they can use any available satellite constellation to determine their position.
GPS – The network of satellites operated and maintained by the US Government.
GNSS – All available satellite networks for real time positioning, including GPS and others.
As a GNSS satellite orbits the earth, it is continuously emitting a radio signal that a receiver can use to obtain the satellite’s precise position in time and space when the signal was emitted. Because it takes time for the signal to reach the receiver, the time the signal was sent can be used to determine how long the radio wave was propagating before it reached the receiver. The distance from the receiving device to the satellite can be determined with this time-of-flight (ToF) data and the known speed of light. With a signal from at least four satellites, the receiver can subsequently calculate the unknown variables of latitude, longitude, altitude, and reference time, allowing the user to visualize their position on Earth.
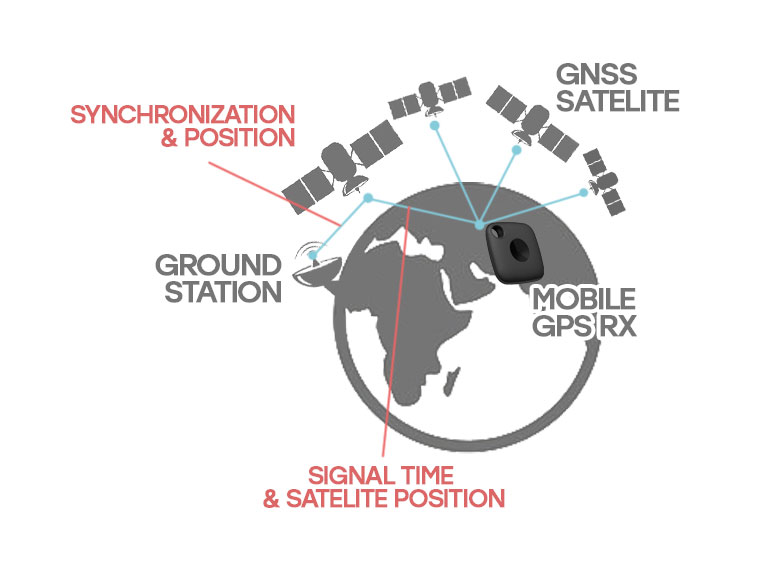
For this system to work, a few important things happen in the background to ensure the satellites are accurately relaying their time and location. Light travels fast, which means any small inaccuracy in timekeeping will lead to significant errors in the final calculated position – a difference of 0.00000001 seconds would result in a final range error of about 3 metres! For this reason, GNSS satellites are outfitted with highly accurate onboard atomic clocks that are also frequently error–checked against an additional network of ground stations. These ground stations update the satellites with relevant information about their orbit while they are being tracked, allowing their exact position to be determined at any given time.

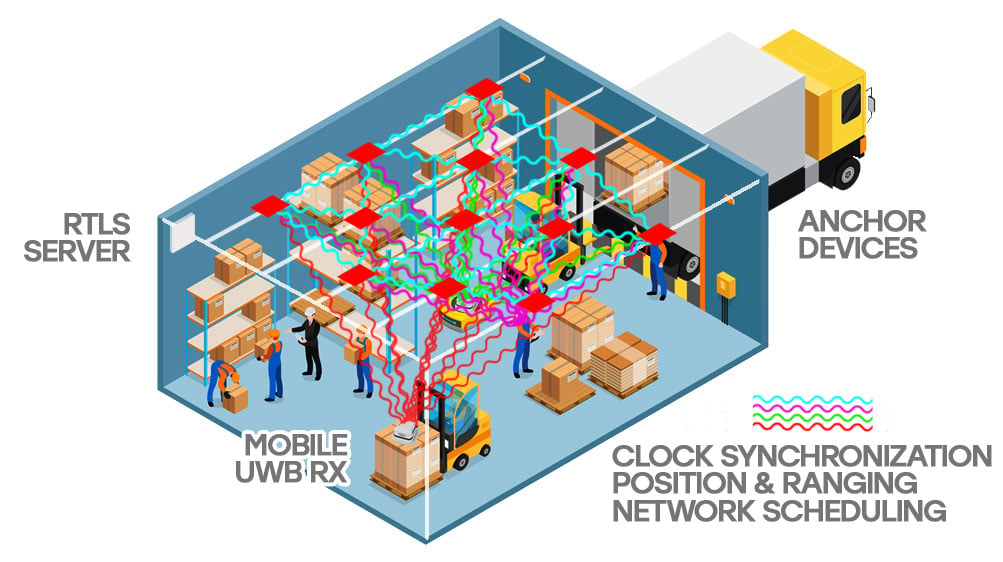
Real-time positioning in indoor environments, such as a factory or warehouse, is of great interest for many applications that require the geospatial location of personnel, inventory, critical assets, tools, and equipment. However, setting up a positioning network at this scale creates unique challenges that have historically limited the availability of accurate and robust indoor positioning systems. In general, these systems follow a similar recipe to a GNSS network – devices with known positions are mounted throughout a facility to anchor the network and communicate continuously with mobile trackers that emit a signal. The signal travel time between mobiles and anchors is used to calculate the distances based on the signal velocity, and with 4 or more ranges, the 3D position can be determined.
Conventional real-time location system technologies like Ultra-Wideband (UWB) or Bluetooth Low Energy (BLE) rely on a Radio Frequency (RF) communication layer for ranging, similar to the operating principles behind GNSS. Because the speed of light is so fast and the distances between the mobile and anchoring devices are small, high-precision timekeeping across the whole network is extremely important. However, atomic timekeeping devices used in GNSS satellites are prohibitively expensive and have other specialized maintenance and operational requirements that make them impractical for indoor positioning systems. Therefore, the conventional systems typically rely on a virtual timekeeping network that runs in the same RF communication layer used for ranging to synchronize the internal clocks with a high enough degree of precision to achieve sufficient positioning.
Several issues with this traditional real-time location system architecture limit its accuracy and robustness. Relying on a single RF communication layer for both time synchronization and ranging makes the precise timekeeping required for hyper-accurate positioning extremely challenging because the signal synchronizing the system components travels at the same speed as the signal being timed!
Furthermore, the highly critical nature of the time synchronization processes means that any breakdown in the communication layer could have deeper impacts on the functionality and precision of the entire system. The broad spectrum, short pulse RF signals typical of systems like UWB are easily absorbed by metal objects such as pallet racking, forklifts, and other industrial machinery, often resulting in dropped or lost communication.
RF ranging in a GNSS network makes sense, as the satellites are over 20,000km away from the receiver. Despite RF being a robust and efficient signal carrier at these scales, in an indoor environment where devices are much closer together, it creates more challenges than it solves due to the constraint of extremely accurate timekeeping. In addition, GPS signals are extremely low power and are greatly degraded indoors, so they tend to drift significantly when used. That’s why your phone may show you being halfway down the street when you’re sitting in your living room. RF travels at the speed of light, which is the fastest thing in the universe! Why time it if you don’t have to?
Ranging Signals: Unleashing Ultrasonics
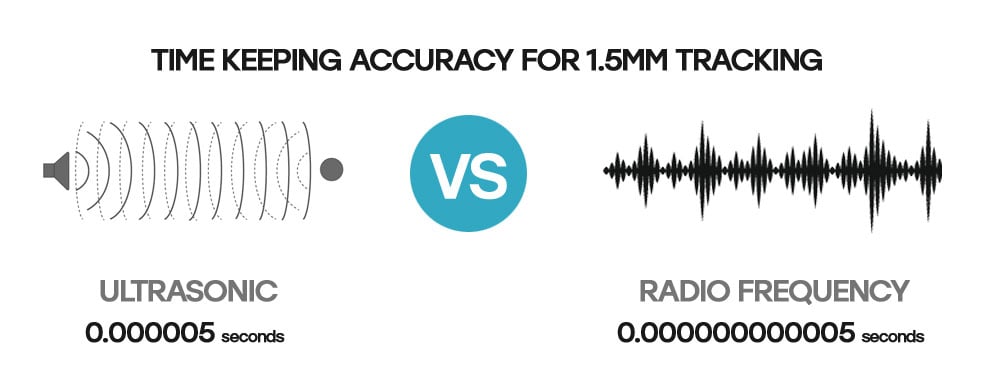
ZeroKey’s Quantum RTLS technology uses ultrasonic communication for ranging to achieve 1.5mm 3D positioning accuracy, a 100-fold increase in accuracy over UWB systems. Because sound travels much slower, the timekeeping accuracy required to achieve precise positioning is significantly reduced. The separate RF communication layer used by Quantum RTLS for scheduling and timing operations, coupled with dramatically lowered timekeeping requirements, eliminates the computationally intense, bandwidth–heavy filtering, and back–and–forth error checking typical of UWB systems.
This enables Quantum RTLS to do more with far less. The hardware is cheaper, consumes less power during operation, and relies less on two-way RF communication across the network. These factors increase the system‘s robustness, especially in industrial environments where metallic objects are abundant. With a best-in-class positioning accuracy of 1.5mm, Quantum RTLS unlocks the ability to digitize and model the real world at a scale far beyond what any other indoor positioning system on the market offers.
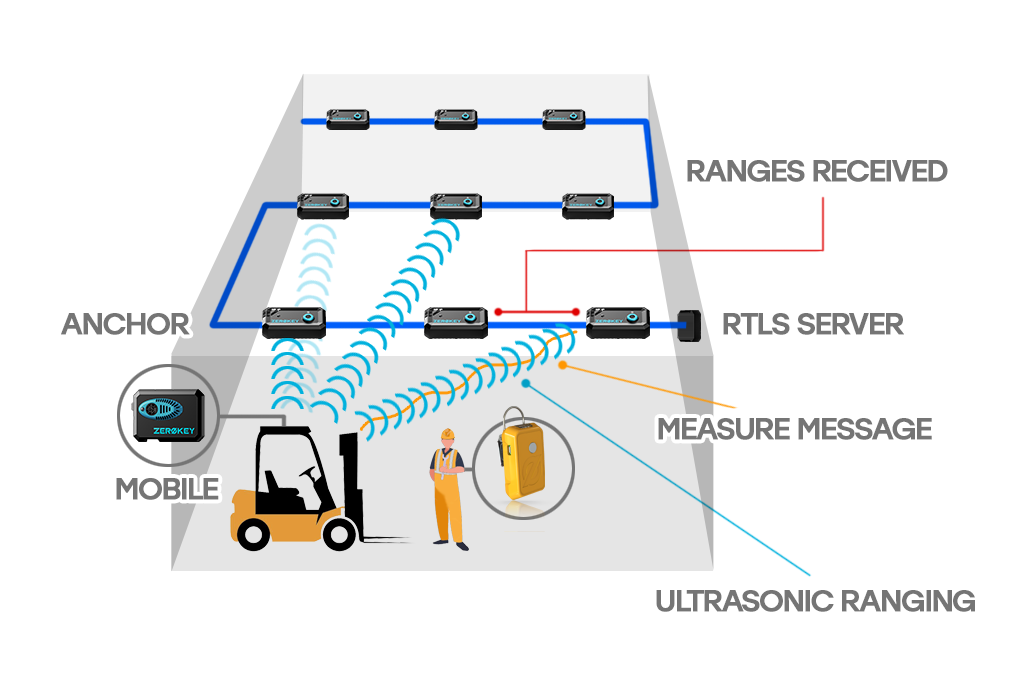
Each Quantum RTLS mobile device emits an ultrasonic signal and an RF ’Measure Message’ simultaneously which is received by nearby anchors. The Measure Message is used to define the moment the ultrasonic signal was sent, and by comparing the elapsed time to reach the receiver, the time-of-flight of the signal is calculated. The precise distances between the mobile device and the anchor are determined using the time-of–flight and the speed of sound (while also accounting for local environmental variables such as air temperature). With four or more ranges and known locations for every anchor, the system achieves an unrivalled 3D positioning accuracy of 1.5mm in real-time.
A Secure and Robust Architecture
The reduced power consumption of Quantum RTLS enables the option for Power-over-Ethernet (PoE) deployment architectures. This allows the ranges captured by the anchors to be sent via wire to the on-premise server where the final position is calculated, reducing the reliance on wireless communications in busy environments with a high potential for interference. The Quantum RTLS PoE architecture also improves overall system security, as the only wireless RF communication that occurs is an encrypted ‘Measure Message’ sent by the mobile device to nearby anchors notifying them of an incoming ultrasonic signal.
Lightweight Hardware Options
The low energy and reduced timekeeping burden associated with ultrasonic ranging allow Quantum RTLS mobile trackers to be very lightweight compared to the hardware offered by other systems. Products like the QTM-DCM10 feature an extremely long battery life (up to 6 months) while the rechargeable QTM-DWR10 wristband’s low-profile form factor offers ergonomic tracking of personnel hand movements for hyper-accurate monitoring and modelling of human-centric workflows.

Always Available Positioning
By integrating onboard Inertial Measurement Units (IMUs) with ZeroKey’s proprietary sensor fusion algorithms, Quantum RTLS enables always available positioning and increased update rates by combining inertial dead reckoning with ultrasonic ranging. For instance, if a mobile device cannot communicate with enough anchors because an autonomous forklift moves underneath dense shelving, Quantum RTLS still accurately determines the position of the machine until it is back within range of enough anchors to support a positioning accuracy of 1.5mm.

Advanced Noise Filtering
Factories and other industrial environments create vast amounts of ultrasonic noise, some of which are likely in the same working range as Quantum RTLS. Fortunately, ultrasonic ranging prevails even in noisy environments, as evidenced by examples in nature where bats in massive colonies manage to navigate and hunt successfully due to their ability to identify their unique sound despite the crowd. Thanks to advanced noise filtering algorithms backed by extensive on-site testing, Quantum RTLS maintains its unprecedented positioning accuracy in even the most dynamic industrial environments where noisy machinery is plentiful.
Auto-Calibrating Anchor Network
Accurate ranges are important for determining the final position of each mobile tracker, but it is equally critical to have accurately defined positions for the anchor network. In the example of GNSS, ground stations use radar and laser tracking to communicate the orbital details to the satellites, which allows their positions to be accurately determined. Conventional indoor positioning systems like UWB and BLE lack the ranging precision to accurately self-survey the anchor network. Instead, they often rely on time-consuming manual surveying to determine every anchor’s positions once installed.
ZeroKey’s Quantum RTLS technology can accurately self-survey the anchor network after installation using a mobile-to-anchor and anchor-to-anchor calibration algorithm that simply requires a user to move a mobile tracker around the tracked space. Once complete, the system does the heavy lifting to determine the accurate coordinates for each anchor in the network.
Quantum RTLS is the world’s most accurate 3D real-time location system. The technology revolutionizes manufacturing processes by digitally twinning operations in real-time with 1.5mm 3D accuracy, making it the leading RTLS for factories worldwide.
Contact us to learn more about how Quantum RTLS can help your business reduce downtime, increase productivity, eliminate errors and costly rework, and optimize your global operations.