QUANTUM RTLS BEATS UWB
WITH 100x BETTER 3D ACCURACY
ZeroKey’s industry-leading industrial real-time location system (RTLS) technology, Quantum RTLS™, is over 100x more accurate than Ultra-Wideband (UWB) solutions. To demonstrate what this increase in performance allows customers to achieve, a side-by-side comparison was conducted using a Quantum RTLS Starter Kit and a competitor’s UWB Kit. Read on to find out how the two systems compare.
Quantum RTLS 2.0 digitizes, automates, and seamlessly integrates industrial operations by bringing unprecedented precision and resolution to the world of real-time location system technology. Capable of digitizing 3D spatial locations with 1.5 mm accuracy, Quantum RTLS 2.0 is over 100x more accurate than other commercially available indoor positioning systems. Despite only reliably achieving an accuracy of 150 millimeters or less, UWB technology has been considered the leading solution for years.
Until now. With ZeroKey’s proprietary and patented ultrasonic-based approach, Quantum RTLS 2.0 shatters that hard limit by two orders of magnitude, unlocking applications that were previously impossible.
ZeroKey’s Research and Development team has extensively tested the ZeroKey system to validate the technology’s millimeter-level accuracy. Nonetheless, we’re often asked how our technology compares to other solutions and what the hundredfold increase in accuracy means in practical terms.
To demonstrate the power of Quantum RTLS 2.0, we conducted a head-to-head comparison using the ZeroKey Starter Kit and a comparable UWB Kit from a well-known manufacturer.

In an unoccupied warehouse, free from any existing RTLS infrastructure or other sources of radio frequency (RF) interference, we set up a positioning area of approximately 4 m by 4 m. Anchor Nodes from each system were mounted on tripods around the circumference of the area.
The UWB Anchors were laid out in the geometry specified by the manufacturer, with three anchors in a line on one side of the area and two anchors positioned on the two remaining corners. The UWB Anchors were powered by Power-over-Ethernet (PoE) injectors that were plugged into USB battery packs and connected to the provided network gateway.
ZeroKey’s Starter Kit instructions suggest a hexagonal configuration for the provided QTM-UAR10 Universal Anchors; however, ZeroKey’s technology maintains a superior level of precision even when minor tweaks are made to the geometry. To ensure a fair comparison, Quantum RTLS Anchors were mounted to the same tripods as the UWB Anchors in a rectangular configuration instead of the hexagonal geometry we recommend. With an integrated battery and data link, ZeroKey’s Universal Anchor Nodes offer maximum flexibility. They can operate wirelessly for use in temporary installations, or they can be hardwired to USB power for permanent setups. In this case, we powered the Quantum RTLS Anchors with the built-in battery and connected them to the QTM-AGP10 Network Gateway included in the Starter Kit.
The UWB system was set up using an anchor-to-anchor calibration, requiring a time-consuming manual input of each anchor’s height above the ground. A laser range finder was used to measure these heights. Next, the system was configured for 3D positioning using software provided with the UWB Starter Kit.
The ZeroKey system was set up using its built-in automatic self-calibration technology, which enables rapid deployment and eliminates the need to manually survey. Using the ZeroKey Configuration Tool, the system was then configured for hyper-accurate 3D positioning.

In the center of the positioning area, an approximately 2 m by 2 m track was constructed with an Intelino Smart Train Set. The track geometry purposely featured curves, switchbacks, and parallel sections to accurately test the positioning capabilities of the two systems. A laser scan was completed using a Faro laser scanner to generate reference truth points on the track.

THE RESULTS
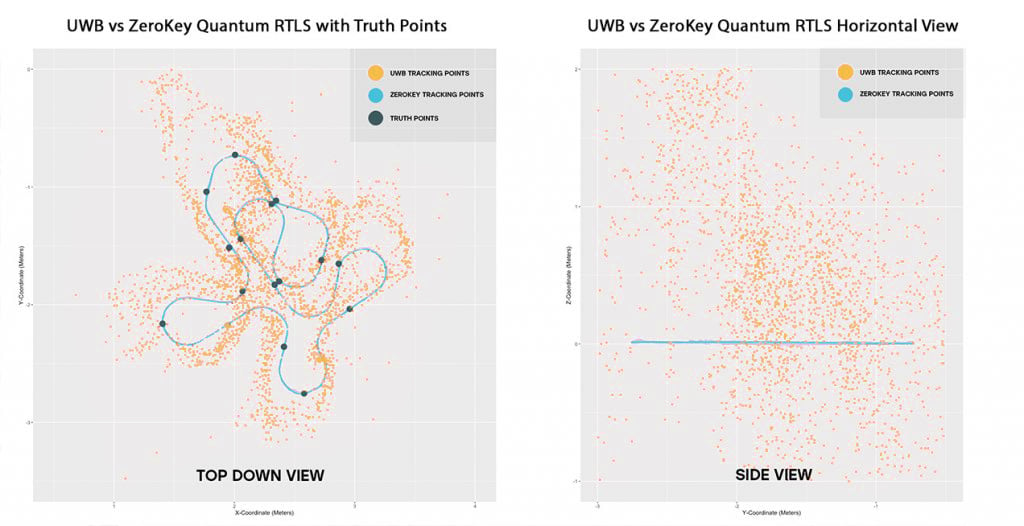
A ZeroKey QTM-SMR10 Universal Mobile and a UWB Tag were mounted to the robotic train cars. Data from each system was collected over multiple laps of the track. By comparing ZeroKey’s positioning data, UWB positioning data from a similar runtime, and truth points from the laser scan, it becomes clear that Quantum RTLS records both the track structure and real-world geometry with near-perfect precision. In contrast, the UWB system detects parts of the track structure, but its scale appears distorted, and there is significant detail loss. Notably, an analysis of the Y- and Z-axis coordinates reveals a large deviation in the height measurements from the UWB system, while Quantum RTLS provides a flat and highly accurate representation of the ground plane.
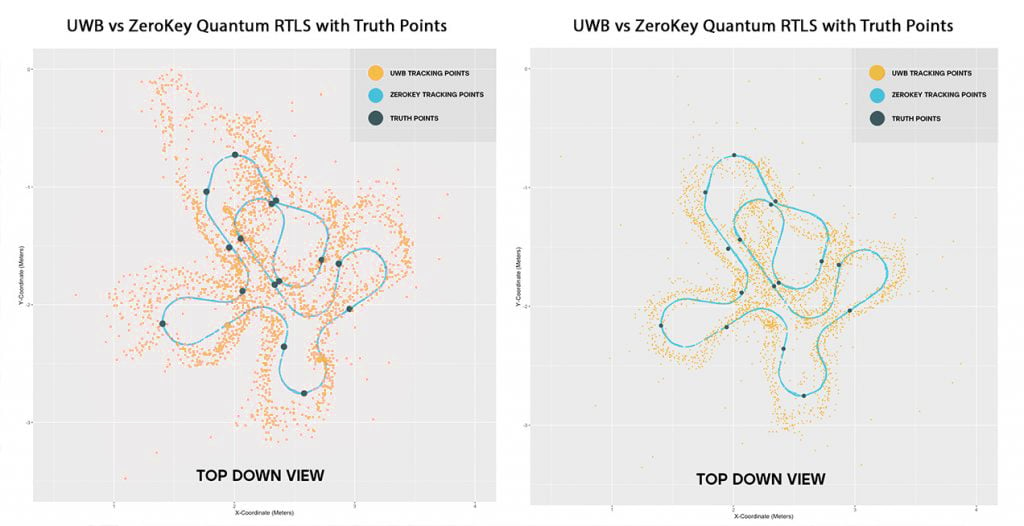
Next, we configured the UWB system with a set tag height of 70 mm to perform positioning in 2D. By comparing an overlay of this data set to the same ZeroKey data set used above, it’s evident that the UWB system cannot clearly distinguish many of the track features, like the tight curves and parallel track sections. While the data trend from the 2-dimensional UWB positioning is closer to the real-world geometry of the track than the results obtained in 3D, it remains significantly distorted.
Plotting the estimated anchor positions from the ZeroKey and UWB systems against their true coordinates from the laser scan further demonstrates the superior level of accuracy that ZeroKey’s Quantum RTLS achieves. To calibrate the UWB Anchors, the above-ground height of each anchor was manually measured and entered into the calibration software. The UWB network then used anchor-to-anchor calibration to estimate each anchor node’s X- and Y-axis positions. The following chart shows that the estimated anchor positions can deviate by more than 200 mm from the actual coordinates determined by the laser scan, even when the UWB calibration only estimates their locations in 2D.
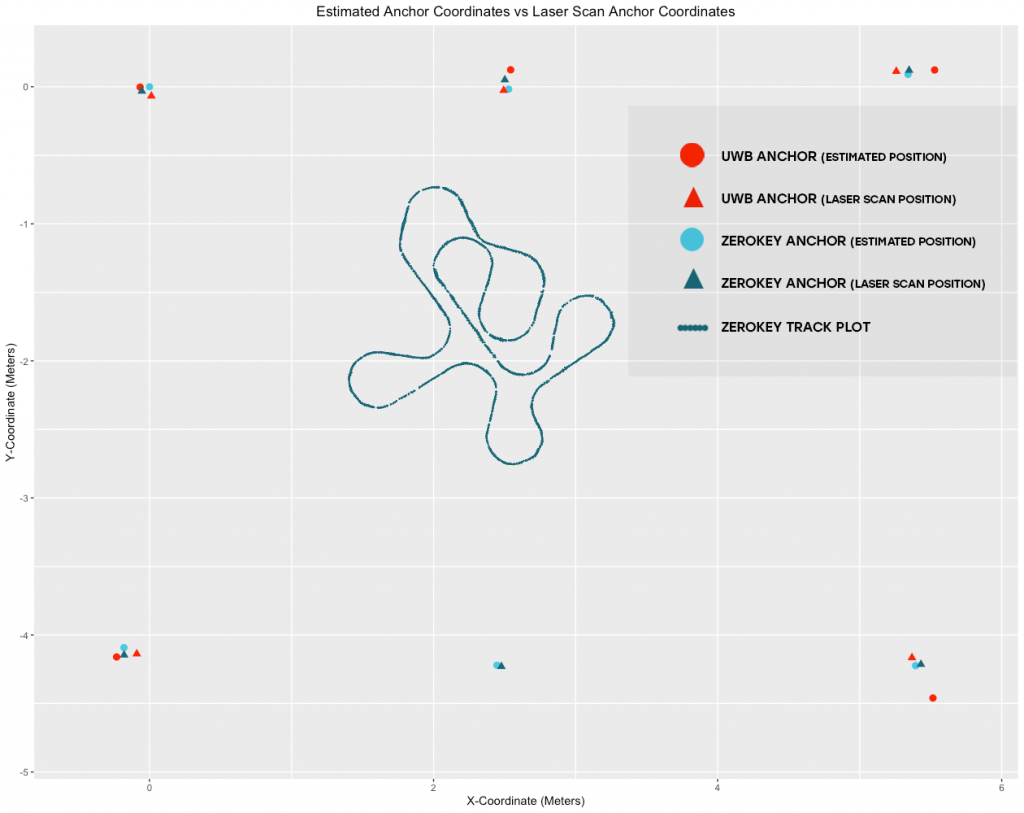
On the other hand, the guided self-calibration performed by ZeroKey’s Quantum RTLS technology did not require any manual measuring and estimated the position of its anchors in 3D to an extremely high degree of accuracy.
The results speak for themselves.
A Quantum RTLS proof of concept or temporary installation is more precise than comparable UWB products and is significantly faster and easier to deploy. Once deployed, ZeroKey’s system delivers real-time horizontal (X and Y-axis) and vertical (Z-axis) positioning results that are over 100 and 1,000 times more accurate, respectively, than those of the UWB system.
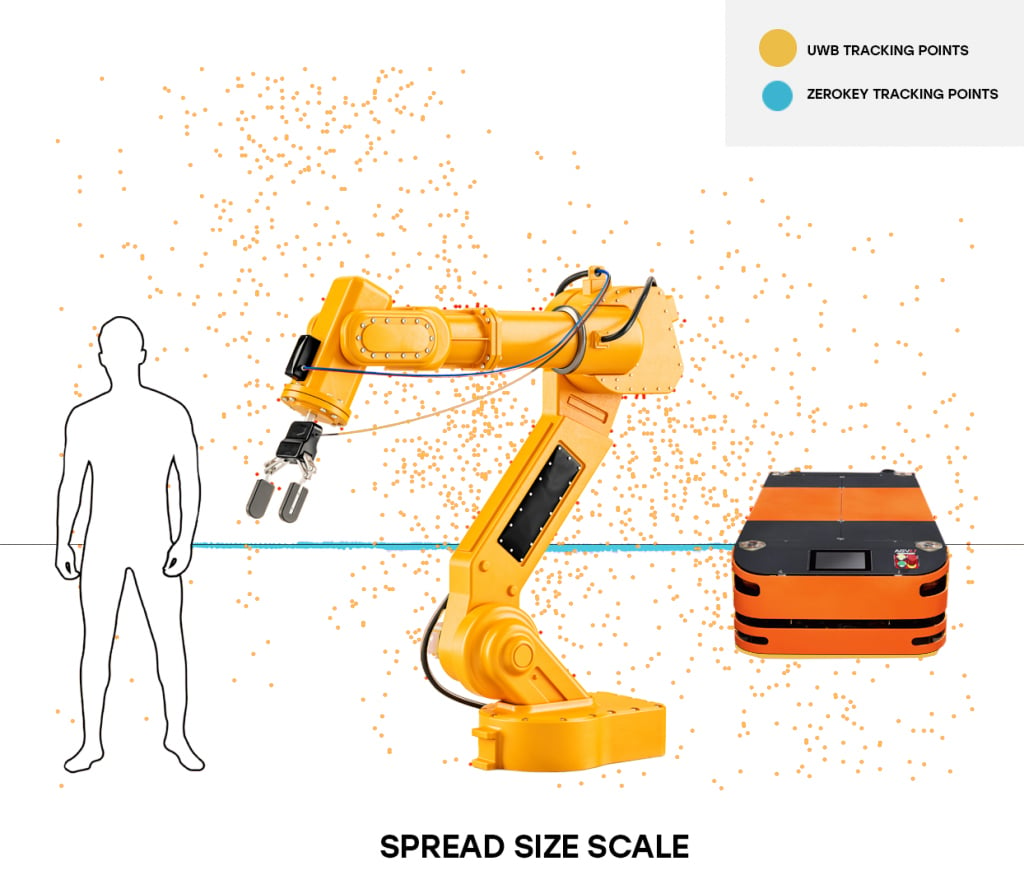
This simple demonstration shows that Quantum RTLS’ accuracy allows businesses to digitize human-centric processes on a much finer scale than what can be achieved with UWB technology. Applications such as bolt sequencing, pick-and-place quality control, and hand and limb safety zones occur well under the 150 mm scale of UWB’s best-case 2D positioning scenario. By visualizing common use cases with a scaled graphic overlay of the 3D positioning data obtained from the two systems, it is evident that ZeroKey’s technology is dramatically transforming industrial processes in a way that has never been done before. It is self-deployable and more reliable than UWB, with 100x better 3D accuracy. With Quantum RTLS, customers gain actionable insight into facility-wide operations and processes, leading to increased production efficiency, improved first-pass yields, and better bottom-line performance.
Frequently Asked Questions
Below are some frequently asked questions about this artcle.
At its core, Quantum RTLS relies on ultrasonic signals to measure the distance between mobile devices and anchor devices. In a general sense, those precise distance measurements are then utilized to compute a 3D position using a multilateration method, similar to how GPS works.
Compared toUltra Wideband (UWB), Ultrasound is a more ideal signal to measure the distance between two points due to its slower speed of propagation. UWB RTLS systems rely on radio-frequency signals to measure this distance, however those signals propagate extremely fast (at the speed of light). As a result, even small errors in time-of-flight measurement translate to large distance errors, and thus lower accuracy positions. Conversely, ultrasound propagates about 100,000 times more slowly, minimizing the impact of small time-of-flight measurement errors and leading to highly accurate positions.
In busy industrial environments with lots of metallic objects, ultrasound again stands out as a more ideal solution. Ultrasonic signals are know to diffusely reflect off of objects, or in other words the reflected signals spread out and dissipate. Radio-frequency signals on the other hand, like those used in UWB, reflect in a specular fashion off of metallic objects and often corrupt the line-of-sight (LOS) signal. This problem is commonly referred to as multipath and is the leading cause of UWB RTLS failure in industrial applications.
Yes, 1.5mm accuracy can be maintained over a large space, even across an entire facility. Careful attention to anchor placement relative to the desired mobile coverage area is required to ensure Quantum RTLS best installation practices are met.
From a performance perspective, Quantum RTLS offers superior positioning characteristics over UWB by 100-fold. However, Quantum RTLS is a newer technology in the market with a currently smaller deployment base and fewer pre-developed software integrations. As a result, it may require more effort to fully integrate into your environment depending on your specific needs. For most applications requiring integration, the ZeroKey Open API makes most integrations simple, with the flexibility to support advanced integrations.
Quantum RTLS is at a TRL level 9 and is a fully commercialized product with active production deployments globally.