



USE CASE
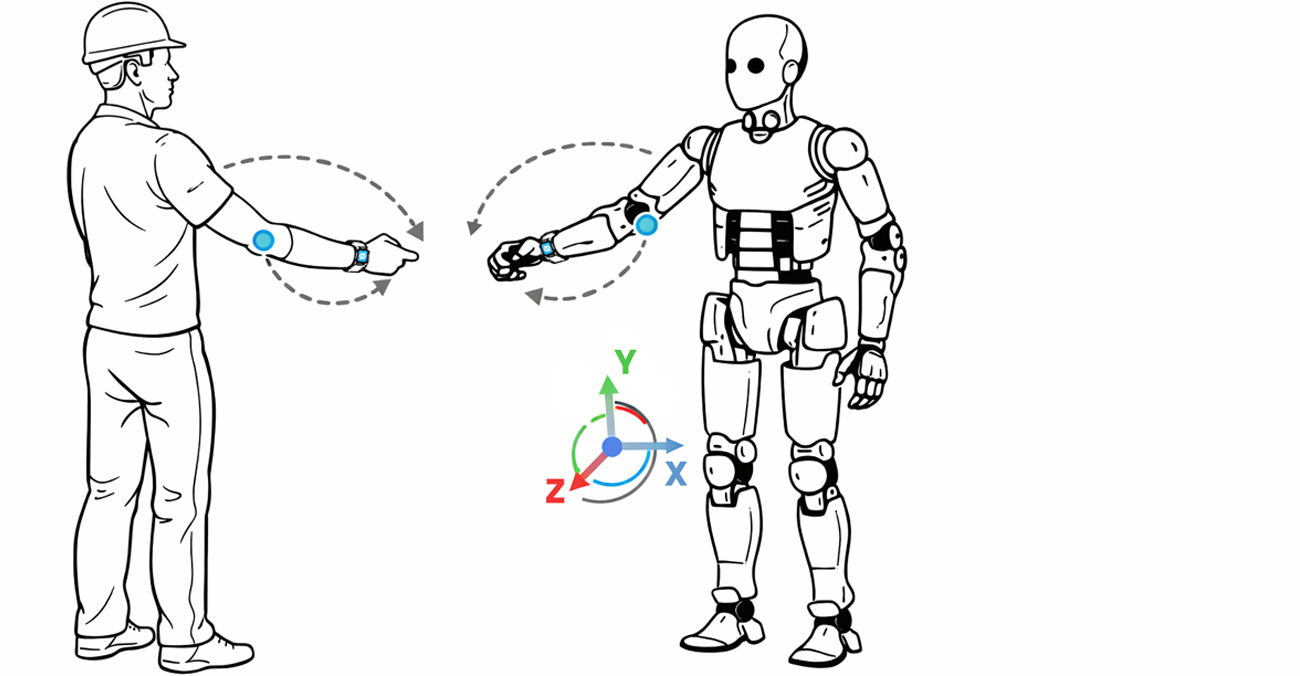
Safer teleoperation
- Precise motion-to-robot mapping
- Stable operator state awareness
- Wide-area tracking beyond labs
- Reliable in messy environments
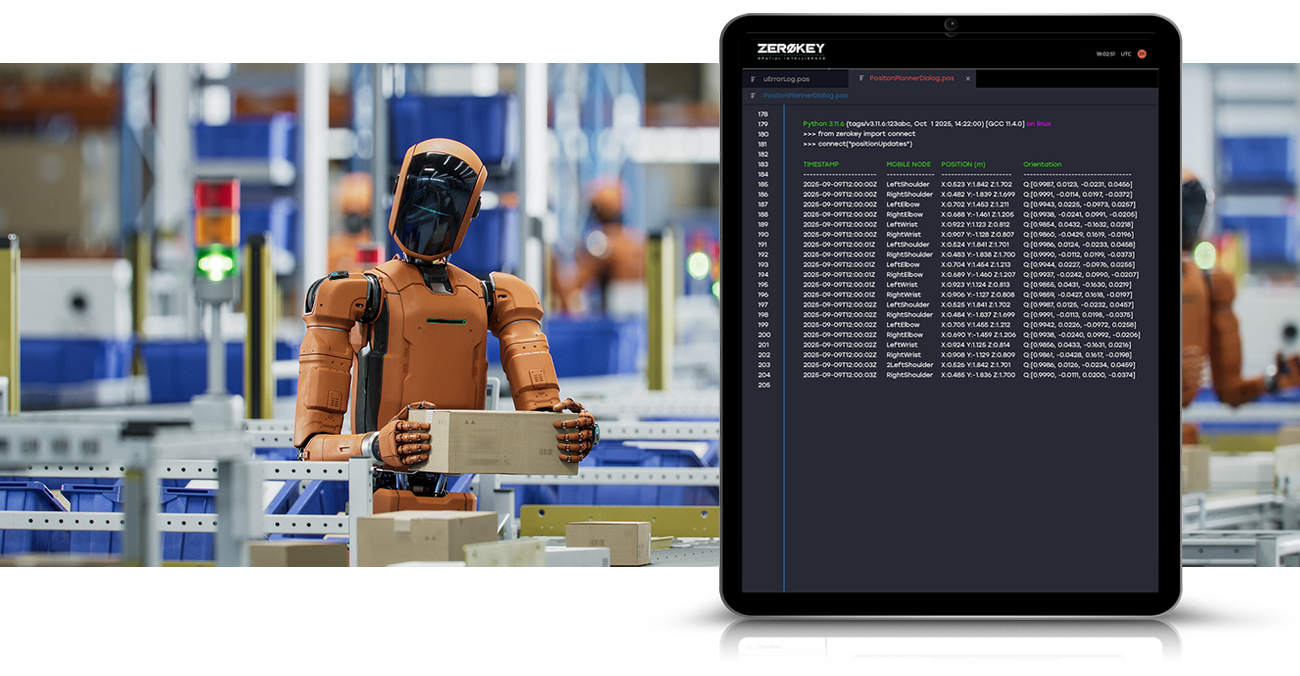
USE CASE
Better physical AI training
- One coordinate frame for people, robots, and tools
- Clean timestamped motion data at high frequency
- Higher-quality demonstrations and training sets
- Works in real environments, not just labs
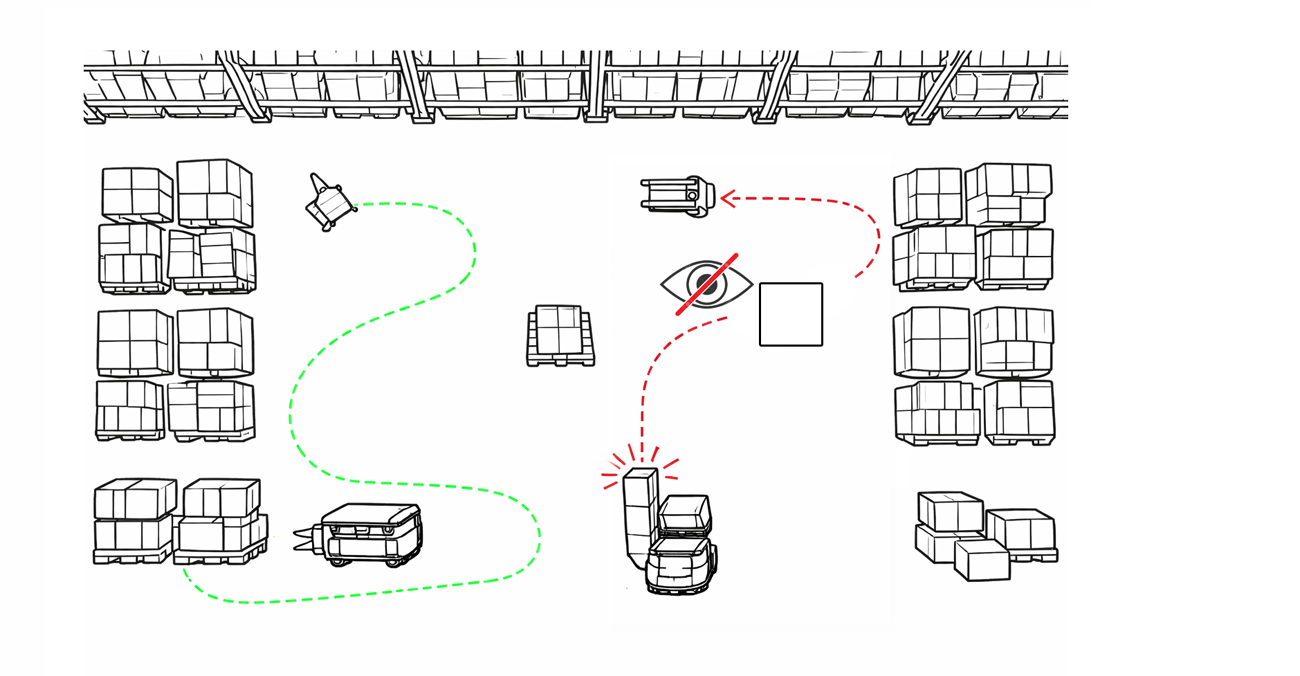
USE CASE
Camera & SLAM augmentation
- Continuous absolute position reference
- Reduces accumulated drift
- Improves localization confidence
- Stabilizes robot state when vision degrades
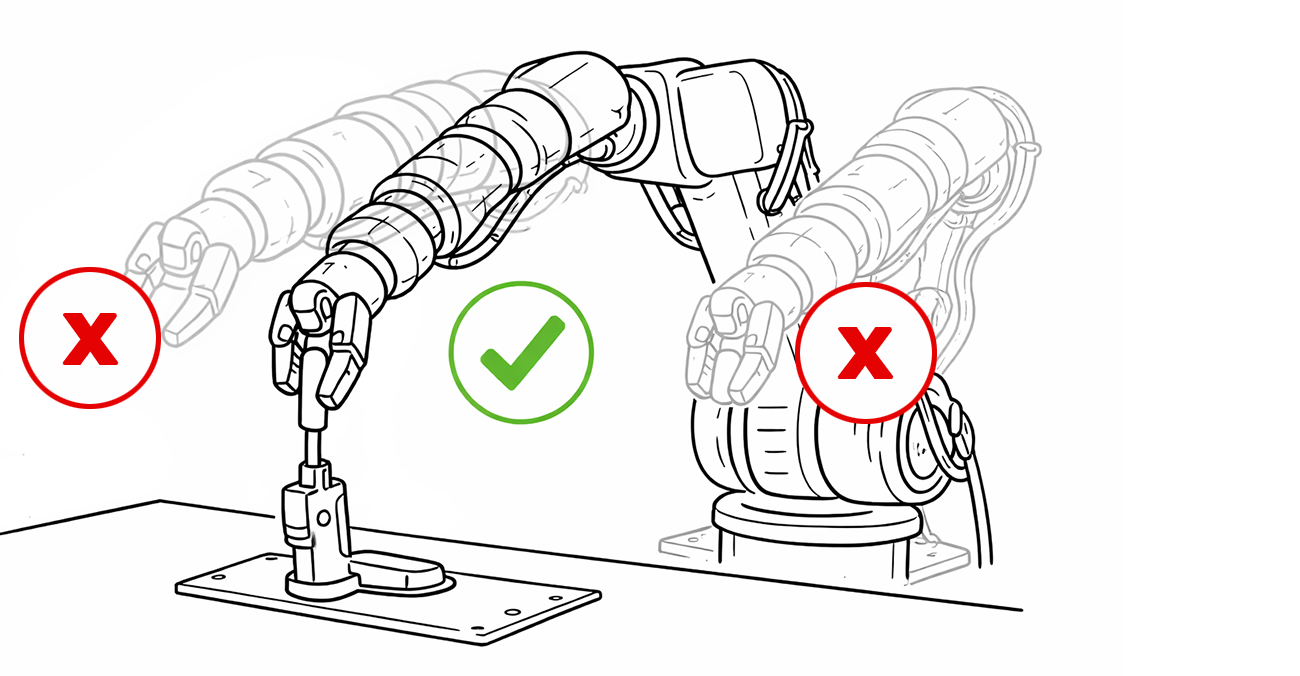
USE CASE
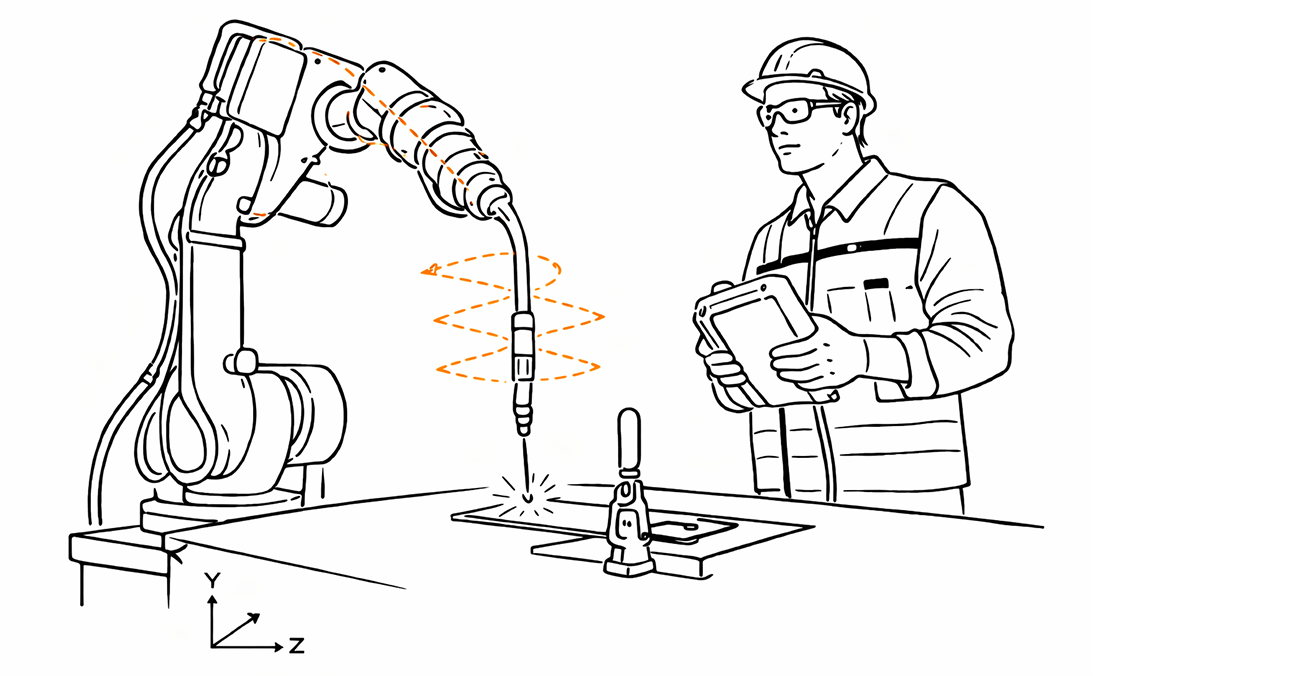
Calibration & validation
- Compare estimated vs. measured motion
- Validate kinematics and alignment
- Track tool paths in real time
- Support continuous tuning
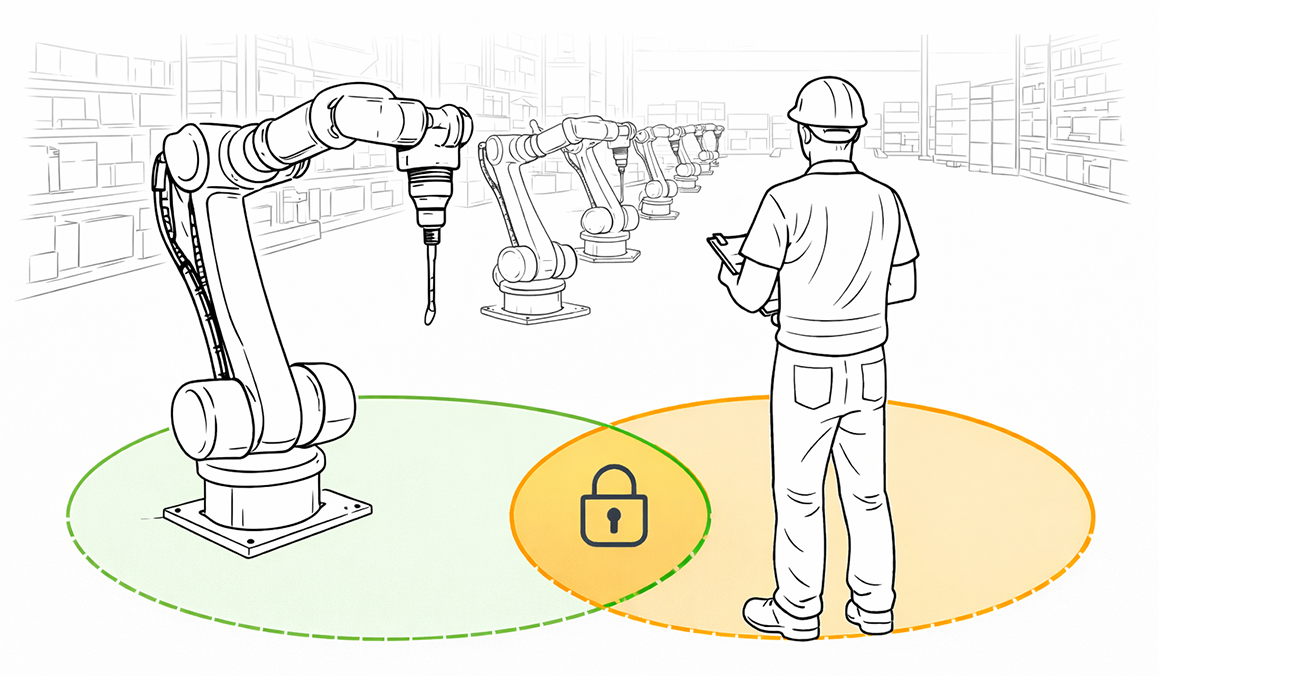
USE CASE
Cobot enablement
- Robots know where people are
- Safer shared workspaces
- Better human-robot handoffs
- Fewer manual safety workarounds