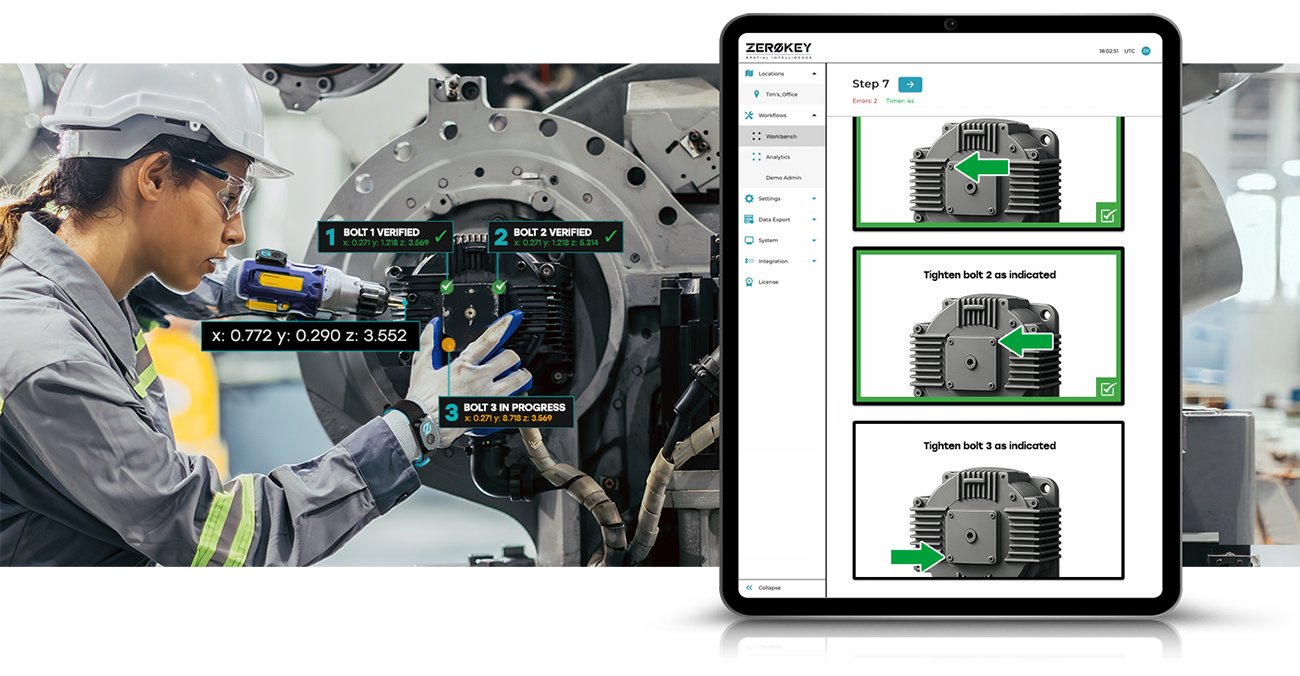
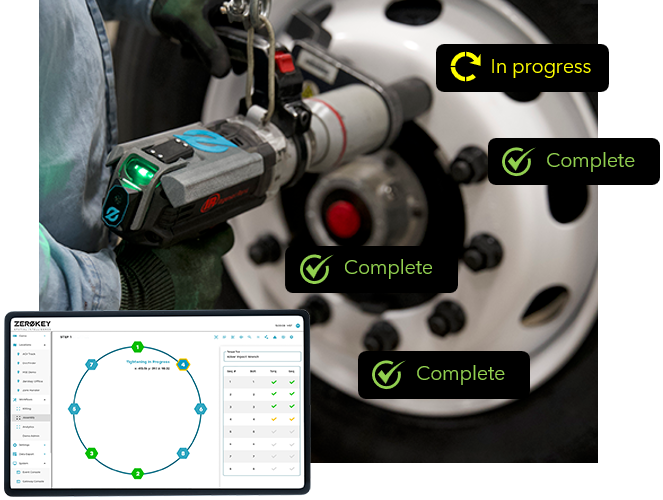
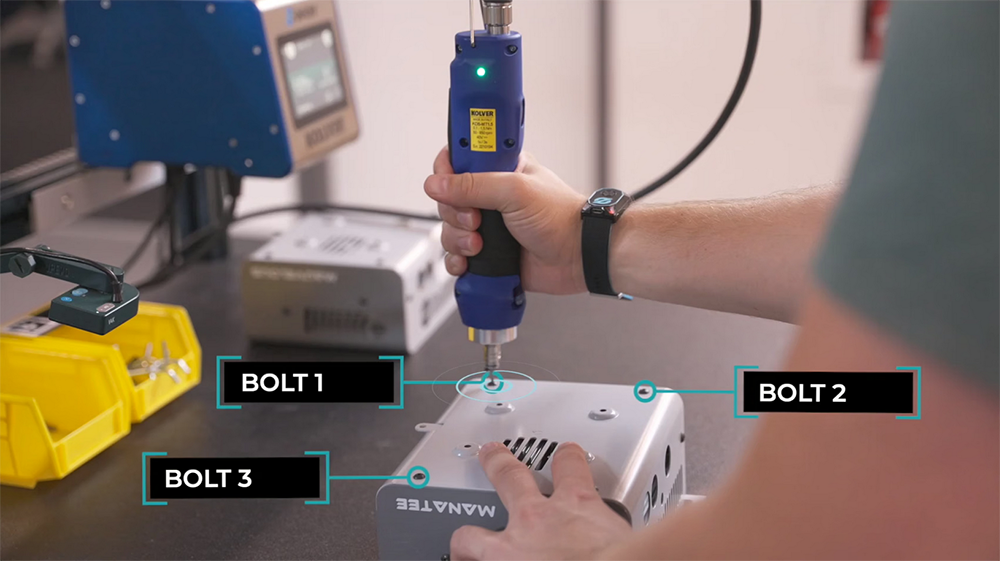
Vision systems can work when the camera has a clear view, but fastening is rarely that clean. Hands, tools, fixtures, glare, shadows, and part variation can all get in the way. Quantum RTLS tracks the tool in 3D, so it does not need to see the bolt.
Compared with fixed encoder-arm systems, Quantum RTLS is less restrictive for the operator and easier to apply to flexible stations or moving work. You get the same basic result of confirming the correct fastener location without tying the tool to a rigid mechanical arm.
It is also typically much lower cost to start and much easier to scale. Once the positioning infrastructure is in place, additional tools, stations, and workflows can be added without rebuilding a dedicated mechanical setup at every location.